-
 RLV-TD HEX01, TDV being transported
RLV-TD HEX01, TDV being transported -
 RLV-TD HEX01 at First Launch Pad of Satish Dhawan Space Centre, Sriharikota (SDSC SHAR) before launch 01
RLV-TD HEX01 at First Launch Pad of Satish Dhawan Space Centre, Sriharikota (SDSC SHAR) before launch 01 -
 Launch of RLV-TD HEX01 from First Launch Pad of Satish Dhawan Space Centre, Sriharikota (SDSC SHAR) 02
Launch of RLV-TD HEX01 from First Launch Pad of Satish Dhawan Space Centre, Sriharikota (SDSC SHAR) 02 -
 LEX-01 simulating vehicle landing parameters.
LEX-01 simulating vehicle landing parameters. -
 LEX-02 maiden autonomous landing.
LEX-02 maiden autonomous landing. -
 To enhance safety during autonomous landing maneuvers, LEX-03 utilized a new kinematics package, enhanced satellite navigation, and multi-sensor fusion for real-time parameter modification and error correction.
To enhance safety during autonomous landing maneuvers, LEX-03 utilized a new kinematics package, enhanced satellite navigation, and multi-sensor fusion for real-time parameter modification and error correction.
(Redirected from
RLV-LEX)
 Technology Development Vehicle (TDV) for RLV Programme | |
| Program overview | |
|---|---|
| Country | India |
| Organization | ISRO |
| Programme history | |
| Duration | 2012–present [1] |
| First flight | 01:30 UTC, 23 May 2016 [2] |
| Last flight | March 2024 |
| Successes | 2 |
| Launch site(s) | |
| Vehicle information | |
| Launch vehicle(s) | GSLV Mark II |
Reusable Launch Vehicle–Technology Demonstration Programme is a series of
technology demonstration missions that has been conceived by the
Indian Space Research Organisation (ISRO) as a first step towards realising a
Two Stage To Orbit (TSTO) re-usable launch vehicle, in which the second stage is a
spaceplane.
[3]
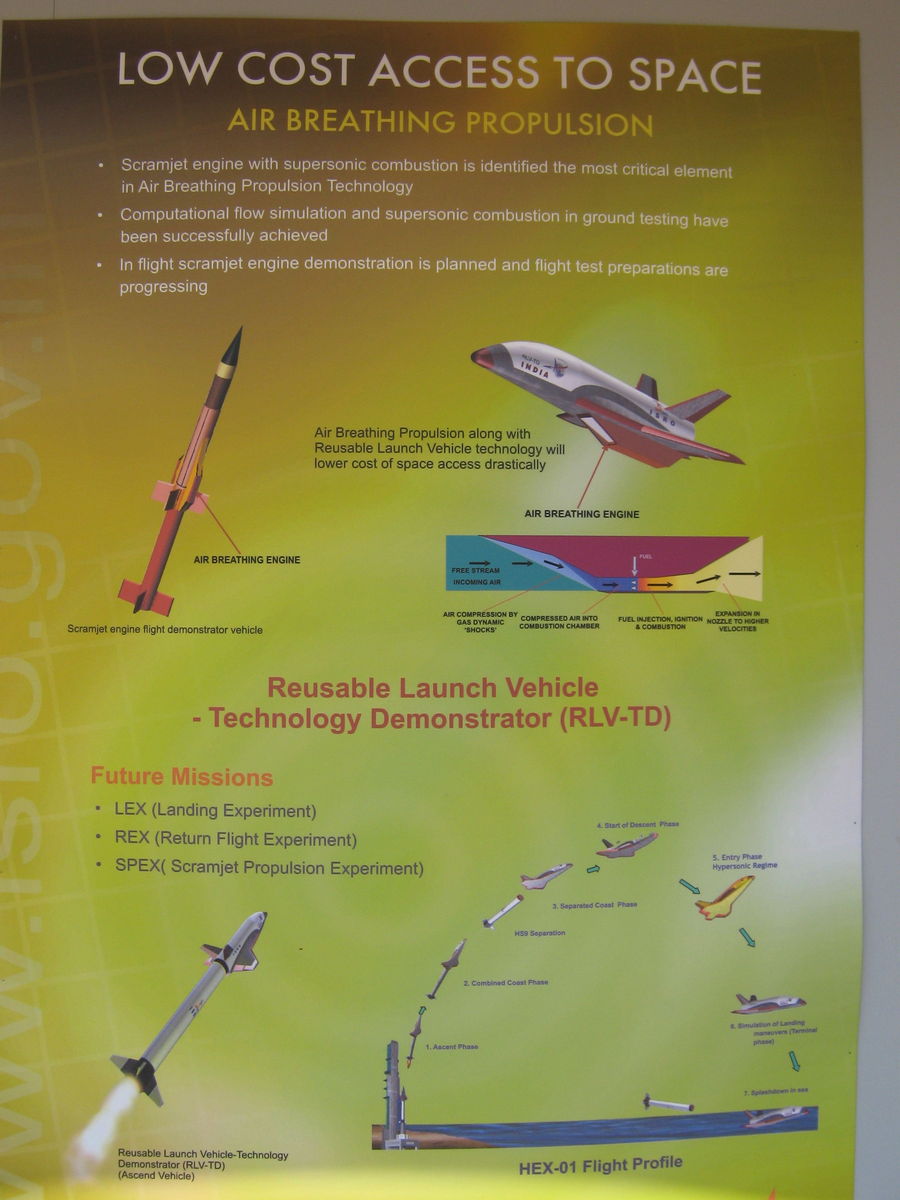
For this purpose, a winged reusable launch vehicle technology demonstrator ( RLV-TD) has been configured. The RLV-TD acted as a flying test bed to evaluate various technologies like powered cruise flight, hypersonic flight, and autonomous landing using air-breathing propulsion. Application of these technologies would bring down the launch cost by a factor of 10. [4] This project has no connection with the Avatar spaceplane concept by India's Defence Research and Development Organisation. [5]
History
In 2006 the Indian Space Research Organisation (ISRO) performed a series of ground tests to demonstrate stable supersonic combustion for nearly 7 seconds with an inlet Mach number of 6. [6]
In March 2010, ISRO conducted the flight testing of its new sounding rocket: Advanced Technology Vehicle (ATV-D01), weighing 3 tonnes at lift-off, a diameter of .56 m (1 ft 10 in), and a length of ~10 m (33 ft). [7] It carried a passive scramjet engine combustor module as a test-bed for demonstration of air-breathing propulsion technology. [8]
In January 2012, ISRO announced that a scaled prototype, called Reusable Launch Vehicle-Technology Demonstrator (RLV-TD), was approved to be built and tested. [9] The aerodynamics characterization on the RLV-TD prototype was done by National Aerospace Laboratories in India. The RLV-TD is in the last stages of construction by a Hyderabad-based private company called CIM Technologies. The fixed landing gear for the RLV-TD was supplied by Timetooth Technologies. The full-scale RLV is expected to use retractable landing gear. [10]
By May 2015, engineers at the Vikram Sarabhai Space Centre (VSSC) in Thumba Equatorial Rocket Launching Station were installing thermal tiles on the outer surface of the RLV-TD to protect it against the intense heat during atmospheric reentry. [11] This prototype weighs around 1.5 tonnes and flew to an altitude of 65 km [11] mounted on top of an expendable solid booster HS9. [12] [13]
On August 28, 2016, ISRO successfully tested its scramjet engine on second developmental flight of its Advanced Technology Vehicle ATV-D02 from the Satish Dhawan Space Centre for 28 August 2016. [14] [15] The scramjet engine will be integrated to the RLV at a later stage of development. [16]
Pushpak (RLV-TD)
_before_launch_03.jpg)
Pushpak ( Sanskrit, ISO: Puṣpaka, lit. 'Flower', Namesake: Pushpaka Vimana) [17] (also known as RLV-TD or Reusable Launch Vehicle Technology Demonstrator) is India's first uncrewed flying testbed developed for the ISRO's RLV Technology Demonstration Programme started in 2012. It is a scaled down prototype of an eventual two-stage-to-orbit (TSTO) reusable launch vehicle.
In January 2012, the design of ISRO's reusable launch vehicle was approved by the National Review Committee and clearance was granted to build the vehicle. The vehicle was named 'Reusable Launch Vehicle-Technology Demonstrator' (RLV-TD). [18] ISRO aims to bring down the cost of payload delivery to low Earth orbit by 80% from existing $20,000/kg to $4,000/kg. [19] [20] [21]
The RLV-TD was developed with an objective to test various aspects such as hypersonic flight, autoland, powered cruise flight, hypersonic flight using the air-breathing engine propulsion and Hypersonic Experiment. A series of four RLV-TD test flights are planned by ISRO: [18] [22] [23] HEX (Hypersonic Flight Experiment), LEX (Landing Experiment), REX (Return Flight Experiment) later renamed to OREX (Orbital Return Flight Experiment), and SPEX (Scramjet Propulsion Experiment).
A team of 750 engineers at Vikram Sarabhai Space Centre, National Aeronautical Laboratory, and Indian Institute of Science worked on the design and development of RLV-TD and the associated rocket. RLV-TD underwent 120 hours of wind tunnel, 5,000 hours of computational fluid dynamics and 1,100 runs of flight simulation tests. RLV-TD has mass of 1.75 tonnes, wingspan of 3.6 meters and overall length of 6.5 meters (excluding the rocket). The vehicle had 600 heat-resistant tiles on its undercarriage and it features delta wings and angled tail fins. [24] [25] Total cost of the project was ₹95 crore (equivalent to ₹137 crore or US$16.4 million in 2023). [26] [27] Future planned developments include testing an air-breathing propulsion system, which aims to capitalise on the oxygen in the atmosphere instead of liquefied oxygen while in flight. [28]
Engines
In January 2006, ISRO completed the design, development and tests of Scramjet ( supersonic ramjet) at its Vikram Sarabhai Space Centre in Thiruvananthapuram. During the ground tests, stable supersonic combustion with an inlet Mach number 6 was demonstrated for 7 seconds.
On 3 March 2010, ISRO successfully conducted the flight test of its new sounding rocket ATV-D01 from Satish Dhawan Space Centre in Sriharikota. ATV-D01 weighed 3 tonnes at lift-off and was the heaviest sounding rocket ever developed by ISRO at the time. It was mounted with a passive Scramjet engine. The rocket flew for 7 seconds, achieved Mach number 6 + 0.5 and dynamic pressure 80 + 35 kPa. [29] [30]
RLV TD Experiments
Hypersonic Flight Experiment
The Reusable Launch Vehicle Hypersonic Flight Experiment or RLV HEX was the first test flight in the RLV Technology Demonstration Programme. HEX was successfully conducted on 23 May 2016. [2] [31] [32] RLV-TD consists of a fuselage (body), a nose cap, double delta wings and twin vertical rudders. It has active control surfaces called Elevons and Rudders. [32] Apart from the twin rudders it is similar in shape and operation to a small Space Shuttle Orbiter. TDV uses 600 or so heat resistant silica tiles and Flexible External Insulation, nose-cap is made out Carbon-Carbon composite with SiC coating. The leading edges of twin rudders are Inconel-718, wing leading edges of 15CDV6. [33] [34] [35] [36] [37] [38]
HEX was the first test flight of a reusable launch vehicle developed by India. The test flight objectives included: [39]
- Validating the aerodynamic design characteristics during hypersonic flight
- Characterize induced loads during the hypersonic descent through the atmosphere
- Assess the performance of the carbon fibre used in construction of the nose of the vehicle
- Demonstrate first stage separation sequencing
The vehicle was tracked during its flight from ground stations at Sriharikota and a shipborne terminal. The total flight duration from launch to splashdown lasted about 773.6 seconds. [40] The unit was not planned to be recovered. [41] [42] ISRO plans to construct an airstrip greater than 4km long in Sriharikota island in the "near future". Critical technologies such as autonomous navigation, guidance & control, reusable thermal protection system, and descent mission management were validated in this flight. [43]
Landing Experiment
The Reusable Launch Vehicle Landing Experiment or RLV-LEX was the second test flight in the RLV Technology Demonstration Programme following the Hypersonic Flight Experiment. The demonstration trials will pave the way for the two-stage-to-orbit (TSTO) fully reusable launch vehicle. Furthermore, more test similar to RLV-LEX will be conducted to test other conditions like wind, different failure conditions and other factors to finalise the testing of the vehicle. [44]
RLV-LEX-01
RLV-LEX was successfully conducted on 2 April 2023 at the Chitradurga Aeronautical Test Range. [45] The flight took off at 7:10 AM and was released mid-air at a downrange of 4.6 km. The Vehicle landed at about 7:40 AM
The test flight objectives included: [46]
- Simulating the exact conditions of a Space Re-entry vehicle's landing - high speed, unmanned, autonomous, precise landing from the same return path
- Validating the landing parameters such as the ground relative velocity, the sinking rate of landing gears and precise body rates as might be experienced by an orbital re-entry space vehicle on its return path
The Test Vehicle was dropped from an Indian Air Force Boeing CH-47 Chinook Heavy-Lift Helicopter after being carried as an underslung payload.
After the successful completion of the mission, S. Somanath, chairman of ISRO, said to the media that they are currently planning to conduct more such landing tests to check the readiness of software and hardware under different conditions. The reported test will include the vehicle being dropped from an altitude of about 4.5 kilometres and at a lateral difference following which the vehicle must automatically guide itself for a landing. [47] The test will now be retroactively referred to as RLV-LEX-01
RLV-LEX-02
Another landing experiment was conducted at Chitradurga Aeronautical Test Range on 22 March 2024. [48] Four kilometres from the runway, at a height of 4.5 km, the Boeing CH-47 Chinook of Indian Air Force hoisted and released the test vehicle. The vehicle had to correct both cross-range and down-range deviations before landing autonomously on the runway due to the experiment's more difficult manoeuvres and dispersions. [49] The vehicle used its nosewheel steering system, landing gear brakes, and drogue parachute to help it come to a precise halt on the runway after making the required cross-range modifications. RLV-LEX-02 made use of the same Flight Demonstrator Vehicle as RLV-LEX-01. Liquid Propulsion System Centre (LPSC), ISRO Inertial Systems Unit (IISU), Vikram Sarabhai Space Centre, and the Indian Air Force worked together with the Aeronautical Development Establishment (ADE), Aerial Delivery Research and Development Establishment (ADRDE), and other agencies to complete the mission. [50] [51]
RLV-LEX-03
ISRO completed the preparation for the third and last RLV landing experiment, RLV-LEX-03. At the Mission Readiness Review meet on 7 June 2024, S. Unnikrishnan Nair, Director of the Vikram Sarabhai Space Center, certified the mission for the first half of June at the Chitradurga Aeronautical Test Range, subject to weather conditions. In contrast to LEX-02, where the altitude was the same but the lateral distance from the runway was 150 meters, Pushpak will be flown by an IAF Chinook helicopter to a height of 4.5 kilometers and 500 meters to one side of the runway in LEX-03 before being released. The goal of the LEX-03 mission is to investigate methods for lowering the sink rate, or rate of descent, in order to lessen the impact weight. Pushpak will carry an onboard real-time kinematics (RTK) package. The test will also determine how well Pushpak performs in scenarios with a tailwind. [52]
The date of the test was shifted to the end of 2nd week of June due to poor weather conditions. [53] The test was successfully conducted on 23rd June from Chitradurga Aeronautical Test Range. Pushpak was released from an Indian Air Force Chinook Helicopter at an altitude of 4.5 km. [54]
Pushpak automatically carried out cross-range correction maneuvers during the LEX-03 mission, approached the runway, and made a precise horizontal touchdown at the centerline of the runway. The landing velocity of this vehicle approached 320 kmph, which is faster than the average fighter aircraft's 280 kmph and a commercial aircraft's 260 kmph, due to its low lift-to-drag ratio aerodynamic arrangement. The vehicle's braking parachute was used to slow down to almost 100 kmph after touchdown, and the landing gear brakes were then used to bring the vehicle to a stop and decelerate on the runway. Pushpak uses its nose wheel and rudder steering system to automatically maintain a steady and accurate ground roll along the runway during this ground roll phase. [55]
The mission replicated high-speed landing conditions, as well as the approach and landing interface, for a vehicle returning from space. Validation of the sophisticated guidance system that addresses both lateral and longitudinal plane error corrections which is necessary for the next Orbital Return Flight Experiment. The test vehicle was equipped with a pseudolite system, inertial sensor, radar altimeter, flush air data system, and NavIC receiver, among other multi-sensor fusion devices. The RLV-LEX-03 demonstrated the robustness and adaptability of flight systems for multiple missions by reusing the winged body and flight systems from the LEX-02 without any modifications. [55]
Future
Two more experiments are planned by ISRO: OREX (Orbital Return Flight Experiment) and SPEX (Scramjet Propulsion Experiment). [11] [56] [57] The OREX will launch on a GSLV rocket with PS-4 stage instead of its CUS upper stages (due to decreased performance unlike a regular GSLV launch) and Orbital Re-entry vehicle (ORV) in place of its ogive payload fairing and re-enter the earth's atmosphere for a landing to demonstrate the viability of the project. The OREX vehicle will be 1.6 times larger than the Landing Experiment's Pushpak platform. It will have retractable landing gear and a thermal protection system for a safe re-entry into Earth's atmosphere. [52]
Gallery
Photos of RLV TD

_before_launch_01.jpg)
_02.jpg)
_at_Aeronautical_Test_Range_(ATR)_Chitradurga_01.jpg)


See also
- Avatar, an unrelated spaceplane concept by India's DRDO
- Space Rider a planned robotic spaceplane by ESA
References
- ^ "ISRO to Begin Flights of Reusable Launcher Test Bed".
- ^ a b "India's First-Ever Indigenous Space Shuttle RLV-TD Launched Successfully". Archived from the original on 2016-05-23. Retrieved 2016-05-23.
- ^ "Indian Space Research Organisation to test its reusable RLV spacecraft". SpaceFlight Insider. 2 June 2015. Archived from the original on 8 November 2020. Retrieved 8 June 2015.
- ^ "Tuesday, December 22, Isro's small steps towards developing its own reusable rocket [Reusable Launch Vehicle (RLV)] program". LIVE MINT, IN. 2015. Archived from the original on 2016-05-26. Retrieved 2015-12-23.
-
^
"Government of India Department of Space" (PDF). March 14, 2012. Archived from
the original (PDF) on August 5, 2016. Retrieved 2016-04-27.
Feasibility study of project "AVATAR)" has been done by a group of scientists in DRDO. ISRO has no connection with the project.
- ^ "Welcome to Vikram Sarabhai Space Centre - ISRO_Supersonic Combustion Tech". Archived from the original on 2016-03-04. Retrieved 2015-12-23.
- ^ ""Space Transportation Systems: What the future beholds" by Dr. B N Suresh". 2 November 2007. Archived from the original on 1 August 2020. Retrieved 23 December 2015.
- ^ "Successful flight testing of advanced sounding rocket - ISRO". www.isro.gov.in. Archived from the original on 2016-09-09. Retrieved 2015-12-06.
- ^ "ISRO's design of reusable launch vehicle approved". Archived from the original on 2020-08-01. Retrieved 2015-12-25.
- ^ "RLV re-entry mission to use GSLV with PSLV last stage; landing gear to change & more". The Times of India. 2024-06-26. ISSN 0971-8257. Retrieved 2024-06-27.
- ^ a b c "Navigation satellite system by March". Archived from the original on 2020-11-08. Retrieved 2015-12-24.
- ^ "Modeling &Control of Launch Vehicles" (PDF). www.sc.iitb.ac.in. Archived (PDF) from the original on 2015-12-24. Retrieved 2015-12-06.
- ^ "Reusable Launch Vehicles". Brahmand.com. November 25, 2010. Archived from the original on November 1, 2014. Retrieved 2014-10-22.
- ^ "Successful Flight Testing of ISRO's Scramjet Engine Technology Demonstrator". Archived from the original on 2016-09-14. Retrieved 2016-08-28.
- ^ "Indian rockets to soon use atmospheric oxygen as fuel".
- ^ "ISRO set to test scramjet engine". The Hindu. 2015-11-28. ISSN 0971-751X. Archived from the original on 2020-11-08. Retrieved 2015-12-06.
- ^ "India's Reusable Launch Vehicle to be called Pushpak, PM reviews progress". India Today. 27 February 2024. Retrieved 2024-03-15.
- ^ a b "Launch vehicle approved". DNA India. Archived from the original on 11 September 2016. Retrieved 23 May 2016.
- ^ "Make In India Gets Wings With Successful Launch Of Swadeshi Space Shuttle". The Free Press Journal. Archived from the original on 25 May 2016. Retrieved 24 May 2016.
- ^ "India Just Launched A Mini Space Shuttle". sciencealert.com. Archived from the original on 17 September 2016. Retrieved 24 May 2016.
- ^ "Breakthrough in Supersonic combustion technology". Vikram Sarabhai Space Centre website. Archived from the original on 4 March 2016. Retrieved 23 May 2016.
- ^ "Demonstration program". ISRO website. Archived from the original on 23 May 2016. Retrieved 23 May 2016.
- ^ "Low cost access". bharat-rakshak.com. Archived from the original on 3 March 2016. Retrieved 23 May 2016.
- ^ "India Flies Winged Space Plane On Experimental Suborbital Launch". spaceflightnow.com. Archived from the original on 30 August 2016. Retrieved 24 May 2016.
- ^ "ISRO's Reusable Launch Vehicle What Happened And What Next". thewire.in. Archived from the original on 25 May 2016. Retrieved 24 May 2016.
- ^ "VSSC to find new skies". The Indian Express. Archived from the original on 15 September 2016. Retrieved 24 May 2016.
- ^ "India's own space shuttle launched successfully". The Hindustan Times. Archived from the original on 30 August 2016. Retrieved 24 May 2016.
- ^ "ISRO to Test Rocket That Uses Oxygen Directly from the Atmosphere to Fuel Itself". 2016-05-26. Archived from the original on 2016-09-08. Retrieved 2016-07-07.
- ^ "Flight testing of advanced sounding rocket". ISRO website. Archived from the original on 9 September 2016. Retrieved 23 May 2016.
- ^ "ISRO Progresses Towards a Swadeshi Space Plane". Khul Ke. Archived from the original on 2023-09-07. Retrieved 2023-09-07.
- ^ India’s Reusable Launch Vehicle-Technology Demonstrator (RLV-TD), Successfully Flight Tested Archived 2021-02-09 at the Wayback Machine. 23 May 2016. ISRO.
- ^ a b RLV-TD Archived 2021-04-17 at the Wayback Machine. ISRO. 23 May 2016. Includes diagrams.
- ^ Kumar, Kiran (28 April 2016). ""Indigenous Development of Materials for Space Programme"". Archived from the original on 30 June 2020. Retrieved 30 June 2020.
- ^ "SILICA TILES AS A THERMAL PROTECTION FOR RLV-TD" (PDF). Archived (PDF) from the original on 30 June 2020. Retrieved 30 June 2020.
- ^ "Current Science Volume 114 - Issue 01". Archived from the original on 30 June 2020. Retrieved 30 June 2020.
- ^ "The technology behind India's Reusable Launch Vehicle". 12 November 2018. Archived from the original on 30 June 2020. Retrieved 30 June 2020.
- ^ "A Deep Dive Into ISRO's Reusable Launch Vehicle Technology – Part I". Archived from the original on 28 June 2020. Retrieved 30 June 2020.
- ^ "A Deep Dive Into ISRO's Reusable Launch Vehicle Technology – Part II". Archived from the original on 3 July 2020. Retrieved 30 June 2020.
- ^ "An Indian space shuttle takes shape 2009". The Hindu. 31 March 2009. Archived from the original on 2023-04-04. Retrieved 2023-04-24.
- ^ Yadav, Sandeep; Jayakumar, M.; Nizin, Aziya; Kesavabrahmaji, K.; Shyam Mohan, N. (2017-12-01). "Final Phase Flight Performance and Touchdown Time Assessment of TDV in RLV-TD HEX-01 Mission". Journal of the Institution of Engineers (India): Series C. 98 (6): 679–688. Bibcode: 2017JIEIC..98..679Y. doi: 10.1007/s40032-017-0403-9. ISSN 2250-0553. S2CID 115904439.
- ^ "India's Reusable Launch Vehicle Successfully Flight Tested". ISRO website. Archived from the original on 14 September 2016. Retrieved 23 May 2016.
- ^ "ISRO successfully launches Indias first ever indigenous space shuttle". The Economic Times. Archived from the original on 28 August 2016. Retrieved 24 May 2016.
- ^ "ISRO Gears up for 6 Major Missions This Year". Express News Service. 30 May 2015. Archived from the original on 10 September 2016. Retrieved 8 June 2015.
- ^ "Landing experiment likely in Challakere next week". The Times of India. ISSN 0971-8257. Retrieved 2024-03-16.
- ^ ""ISRO Reusable Launch Vehicles Landing Experiment Successful"".
- ^ "ISRO successfully conducts the Reusable Launch Vehicle Autonomous Landing Mission (RLV LEX)". Indian Space Research Organisation. isro.gov.in. April 2, 2023. Archived from the original on April 2, 2023. Retrieved April 2, 2023.
- ^ "Isro reusable launch vehicle's landing experiment successful; RLV closer to orbital re-entry mission". The Times of India. 2023-04-02. ISSN 0971-8257. Archived from the original on 2023-04-02. Retrieved 2023-04-02.
- ^ Kumar, Chethan (2024-03-22). "Isro completes 2nd key landing experiment of reusable launch vehicle". The Times of India. ISSN 0971-8257. Retrieved 2024-03-22.
- ^ Bagla, Pallava (22 March 2024). "Watch: India's 21st Century Pushpak 'Viman' Successfully Launched". NDTV.com. Retrieved 2024-03-22.
- ^ "ISRO nails it again! Landing mission of Reusable Launch Vehicle 'Pushpak' conducted successfully in Karnataka – See Pictures". Financialexpress. 2024-03-22. Retrieved 2024-03-22.
- ^ "ISRO achieves another milestone, successfully lands Pushpak reusable launch vehicle". Moneycontrol. 2024-03-22. Retrieved 2024-03-22.
- ^ a b Rajwi, Tiki (2024-06-08). "ISRO all set for third reusable launch vehicle landing experiment". The Hindu. ISSN 0971-751X. Retrieved 2024-06-09.
- ^ "ISRO's reusable launch vehicle, made for low-cost space missions, set for 3rd test landing this week". ThePrint. 2024-06-17. Retrieved 2024-06-17.
- ^ "Isro's reusable launch vehicle completes 3rd landing test, paving way for orbital re-entry". The Times of India. ISSN 0971-8257. Retrieved 2024-06-23.
- ^ a b "ISRO successfully conducts third and final 'Pushpak' Reusable Launch Vehicle landing experiment". The Hindu. 2024-06-23. ISSN 0971-751X. Retrieved 2024-06-23.
- ^ "Poster on the RLV-TD". Archived from the original on 2016-03-03. Retrieved 2009-07-30.
- ^ "Reusable Launch Vehicle - Technology Demonstration Program (RLV-TD) - ISRO". isro.gov.in. Archived from the original on 2016-05-23. Retrieved 2015-06-08.
{kind=link}
{kind=link}
External links
(Redirected from
RLV-LEX)
|
Technology Development Vehicle (TDV) for RLV Programme | |
| Program overview | |
|---|---|
| Country | India |
| Organization | ISRO |
| Programme history | |
| Duration | 2012–present [1] |
| First flight | 01:30 UTC, 23 May 2016 [2] |
| Last flight | March 2024 |
| Successes | 2 |
| Launch site(s) | |
| Vehicle information | |
| Launch vehicle(s) | GSLV Mark II |
Reusable Launch Vehicle–Technology Demonstration Programme is a series of
technology demonstration missions that has been conceived by the
Indian Space Research Organisation (ISRO) as a first step towards realising a
Two Stage To Orbit (TSTO) re-usable launch vehicle, in which the second stage is a
spaceplane.
[3]
For this purpose, a winged reusable launch vehicle technology demonstrator ( RLV-TD) has been configured. The RLV-TD acted as a flying test bed to evaluate various technologies like powered cruise flight, hypersonic flight, and autonomous landing using air-breathing propulsion. Application of these technologies would bring down the launch cost by a factor of 10. [4] This project has no connection with the Avatar spaceplane concept by India's Defence Research and Development Organisation. [5]
History
In 2006 the Indian Space Research Organisation (ISRO) performed a series of ground tests to demonstrate stable supersonic combustion for nearly 7 seconds with an inlet Mach number of 6. [6]
In March 2010, ISRO conducted the flight testing of its new sounding rocket: Advanced Technology Vehicle (ATV-D01), weighing 3 tonnes at lift-off, a diameter of .56 m (1 ft 10 in), and a length of ~10 m (33 ft). [7] It carried a passive scramjet engine combustor module as a test-bed for demonstration of air-breathing propulsion technology. [8]
In January 2012, ISRO announced that a scaled prototype, called Reusable Launch Vehicle-Technology Demonstrator (RLV-TD), was approved to be built and tested. [9] The aerodynamics characterization on the RLV-TD prototype was done by National Aerospace Laboratories in India. The RLV-TD is in the last stages of construction by a Hyderabad-based private company called CIM Technologies. The fixed landing gear for the RLV-TD was supplied by Timetooth Technologies. The full-scale RLV is expected to use retractable landing gear. [10]
By May 2015, engineers at the Vikram Sarabhai Space Centre (VSSC) in Thumba Equatorial Rocket Launching Station were installing thermal tiles on the outer surface of the RLV-TD to protect it against the intense heat during atmospheric reentry. [11] This prototype weighs around 1.5 tonnes and flew to an altitude of 65 km [11] mounted on top of an expendable solid booster HS9. [12] [13]
On August 28, 2016, ISRO successfully tested its scramjet engine on second developmental flight of its Advanced Technology Vehicle ATV-D02 from the Satish Dhawan Space Centre for 28 August 2016. [14] [15] The scramjet engine will be integrated to the RLV at a later stage of development. [16]
Pushpak (RLV-TD)
Pushpak ( Sanskrit, ISO: Puṣpaka, lit. 'Flower', Namesake: Pushpaka Vimana) [17] (also known as RLV-TD or Reusable Launch Vehicle Technology Demonstrator) is India's first uncrewed flying testbed developed for the ISRO's RLV Technology Demonstration Programme started in 2012. It is a scaled down prototype of an eventual two-stage-to-orbit (TSTO) reusable launch vehicle.
In January 2012, the design of ISRO's reusable launch vehicle was approved by the National Review Committee and clearance was granted to build the vehicle. The vehicle was named 'Reusable Launch Vehicle-Technology Demonstrator' (RLV-TD). [18] ISRO aims to bring down the cost of payload delivery to low Earth orbit by 80% from existing $20,000/kg to $4,000/kg. [19] [20] [21]
The RLV-TD was developed with an objective to test various aspects such as hypersonic flight, autoland, powered cruise flight, hypersonic flight using the air-breathing engine propulsion and Hypersonic Experiment. A series of four RLV-TD test flights are planned by ISRO: [18] [22] [23] HEX (Hypersonic Flight Experiment), LEX (Landing Experiment), REX (Return Flight Experiment) later renamed to OREX (Orbital Return Flight Experiment), and SPEX (Scramjet Propulsion Experiment).
A team of 750 engineers at Vikram Sarabhai Space Centre, National Aeronautical Laboratory, and Indian Institute of Science worked on the design and development of RLV-TD and the associated rocket. RLV-TD underwent 120 hours of wind tunnel, 5,000 hours of computational fluid dynamics and 1,100 runs of flight simulation tests. RLV-TD has mass of 1.75 tonnes, wingspan of 3.6 meters and overall length of 6.5 meters (excluding the rocket). The vehicle had 600 heat-resistant tiles on its undercarriage and it features delta wings and angled tail fins. [24] [25] Total cost of the project was ₹95 crore (equivalent to ₹137 crore or US$16.4 million in 2023). [26] [27] Future planned developments include testing an air-breathing propulsion system, which aims to capitalise on the oxygen in the atmosphere instead of liquefied oxygen while in flight. [28]
Engines
In January 2006, ISRO completed the design, development and tests of Scramjet ( supersonic ramjet) at its Vikram Sarabhai Space Centre in Thiruvananthapuram. During the ground tests, stable supersonic combustion with an inlet Mach number 6 was demonstrated for 7 seconds.
On 3 March 2010, ISRO successfully conducted the flight test of its new sounding rocket ATV-D01 from Satish Dhawan Space Centre in Sriharikota. ATV-D01 weighed 3 tonnes at lift-off and was the heaviest sounding rocket ever developed by ISRO at the time. It was mounted with a passive Scramjet engine. The rocket flew for 7 seconds, achieved Mach number 6 + 0.5 and dynamic pressure 80 + 35 kPa. [29] [30]
RLV TD Experiments
Hypersonic Flight Experiment
The Reusable Launch Vehicle Hypersonic Flight Experiment or RLV HEX was the first test flight in the RLV Technology Demonstration Programme. HEX was successfully conducted on 23 May 2016. [2] [31] [32] RLV-TD consists of a fuselage (body), a nose cap, double delta wings and twin vertical rudders. It has active control surfaces called Elevons and Rudders. [32] Apart from the twin rudders it is similar in shape and operation to a small Space Shuttle Orbiter. TDV uses 600 or so heat resistant silica tiles and Flexible External Insulation, nose-cap is made out Carbon-Carbon composite with SiC coating. The leading edges of twin rudders are Inconel-718, wing leading edges of 15CDV6. [33] [34] [35] [36] [37] [38]
HEX was the first test flight of a reusable launch vehicle developed by India. The test flight objectives included: [39]
- Validating the aerodynamic design characteristics during hypersonic flight
- Characterize induced loads during the hypersonic descent through the atmosphere
- Assess the performance of the carbon fibre used in construction of the nose of the vehicle
- Demonstrate first stage separation sequencing
The vehicle was tracked during its flight from ground stations at Sriharikota and a shipborne terminal. The total flight duration from launch to splashdown lasted about 773.6 seconds. [40] The unit was not planned to be recovered. [41] [42] ISRO plans to construct an airstrip greater than 4km long in Sriharikota island in the "near future". Critical technologies such as autonomous navigation, guidance & control, reusable thermal protection system, and descent mission management were validated in this flight. [43]
Landing Experiment
The Reusable Launch Vehicle Landing Experiment or RLV-LEX was the second test flight in the RLV Technology Demonstration Programme following the Hypersonic Flight Experiment. The demonstration trials will pave the way for the two-stage-to-orbit (TSTO) fully reusable launch vehicle. Furthermore, more test similar to RLV-LEX will be conducted to test other conditions like wind, different failure conditions and other factors to finalise the testing of the vehicle. [44]
RLV-LEX-01
RLV-LEX was successfully conducted on 2 April 2023 at the Chitradurga Aeronautical Test Range. [45] The flight took off at 7:10 AM and was released mid-air at a downrange of 4.6 km. The Vehicle landed at about 7:40 AM
The test flight objectives included: [46]
- Simulating the exact conditions of a Space Re-entry vehicle's landing - high speed, unmanned, autonomous, precise landing from the same return path
- Validating the landing parameters such as the ground relative velocity, the sinking rate of landing gears and precise body rates as might be experienced by an orbital re-entry space vehicle on its return path
The Test Vehicle was dropped from an Indian Air Force Boeing CH-47 Chinook Heavy-Lift Helicopter after being carried as an underslung payload.
After the successful completion of the mission, S. Somanath, chairman of ISRO, said to the media that they are currently planning to conduct more such landing tests to check the readiness of software and hardware under different conditions. The reported test will include the vehicle being dropped from an altitude of about 4.5 kilometres and at a lateral difference following which the vehicle must automatically guide itself for a landing. [47] The test will now be retroactively referred to as RLV-LEX-01
RLV-LEX-02
Another landing experiment was conducted at Chitradurga Aeronautical Test Range on 22 March 2024. [48] Four kilometres from the runway, at a height of 4.5 km, the Boeing CH-47 Chinook of Indian Air Force hoisted and released the test vehicle. The vehicle had to correct both cross-range and down-range deviations before landing autonomously on the runway due to the experiment's more difficult manoeuvres and dispersions. [49] The vehicle used its nosewheel steering system, landing gear brakes, and drogue parachute to help it come to a precise halt on the runway after making the required cross-range modifications. RLV-LEX-02 made use of the same Flight Demonstrator Vehicle as RLV-LEX-01. Liquid Propulsion System Centre (LPSC), ISRO Inertial Systems Unit (IISU), Vikram Sarabhai Space Centre, and the Indian Air Force worked together with the Aeronautical Development Establishment (ADE), Aerial Delivery Research and Development Establishment (ADRDE), and other agencies to complete the mission. [50] [51]
RLV-LEX-03
ISRO completed the preparation for the third and last RLV landing experiment, RLV-LEX-03. At the Mission Readiness Review meet on 7 June 2024, S. Unnikrishnan Nair, Director of the Vikram Sarabhai Space Center, certified the mission for the first half of June at the Chitradurga Aeronautical Test Range, subject to weather conditions. In contrast to LEX-02, where the altitude was the same but the lateral distance from the runway was 150 meters, Pushpak will be flown by an IAF Chinook helicopter to a height of 4.5 kilometers and 500 meters to one side of the runway in LEX-03 before being released. The goal of the LEX-03 mission is to investigate methods for lowering the sink rate, or rate of descent, in order to lessen the impact weight. Pushpak will carry an onboard real-time kinematics (RTK) package. The test will also determine how well Pushpak performs in scenarios with a tailwind. [52]
The date of the test was shifted to the end of 2nd week of June due to poor weather conditions. [53] The test was successfully conducted on 23rd June from Chitradurga Aeronautical Test Range. Pushpak was released from an Indian Air Force Chinook Helicopter at an altitude of 4.5 km. [54]
Pushpak automatically carried out cross-range correction maneuvers during the LEX-03 mission, approached the runway, and made a precise horizontal touchdown at the centerline of the runway. The landing velocity of this vehicle approached 320 kmph, which is faster than the average fighter aircraft's 280 kmph and a commercial aircraft's 260 kmph, due to its low lift-to-drag ratio aerodynamic arrangement. The vehicle's braking parachute was used to slow down to almost 100 kmph after touchdown, and the landing gear brakes were then used to bring the vehicle to a stop and decelerate on the runway. Pushpak uses its nose wheel and rudder steering system to automatically maintain a steady and accurate ground roll along the runway during this ground roll phase. [55]
The mission replicated high-speed landing conditions, as well as the approach and landing interface, for a vehicle returning from space. Validation of the sophisticated guidance system that addresses both lateral and longitudinal plane error corrections which is necessary for the next Orbital Return Flight Experiment. The test vehicle was equipped with a pseudolite system, inertial sensor, radar altimeter, flush air data system, and NavIC receiver, among other multi-sensor fusion devices. The RLV-LEX-03 demonstrated the robustness and adaptability of flight systems for multiple missions by reusing the winged body and flight systems from the LEX-02 without any modifications. [55]
Future
Two more experiments are planned by ISRO: OREX (Orbital Return Flight Experiment) and SPEX (Scramjet Propulsion Experiment). [11] [56] [57] The OREX will launch on a GSLV rocket with PS-4 stage instead of its CUS upper stages (due to decreased performance unlike a regular GSLV launch) and Orbital Re-entry vehicle (ORV) in place of its ogive payload fairing and re-enter the earth's atmosphere for a landing to demonstrate the viability of the project. The OREX vehicle will be 1.6 times larger than the Landing Experiment's Pushpak platform. It will have retractable landing gear and a thermal protection system for a safe re-entry into Earth's atmosphere. [52]
Gallery
Photos of RLV TD
-
RLV-TD HEX01, TDV being transported
-
RLV-TD HEX01 at First Launch Pad of Satish Dhawan Space Centre, Sriharikota (SDSC SHAR) before launch 01
-
Launch of RLV-TD HEX01 from First Launch Pad of Satish Dhawan Space Centre, Sriharikota (SDSC SHAR) 02
-
LEX-01 simulating vehicle landing parameters.
-
LEX-02 maiden autonomous landing.
-
To enhance safety during autonomous landing maneuvers, LEX-03 utilized a new kinematics package, enhanced satellite navigation, and multi-sensor fusion for real-time parameter modification and error correction.
See also
- Avatar, an unrelated spaceplane concept by India's DRDO
- Space Rider a planned robotic spaceplane by ESA
References
- ^ "ISRO to Begin Flights of Reusable Launcher Test Bed".
- ^ a b "India's First-Ever Indigenous Space Shuttle RLV-TD Launched Successfully". Archived from the original on 2016-05-23. Retrieved 2016-05-23.
- ^ "Indian Space Research Organisation to test its reusable RLV spacecraft". SpaceFlight Insider. 2 June 2015. Archived from the original on 8 November 2020. Retrieved 8 June 2015.
- ^ "Tuesday, December 22, Isro's small steps towards developing its own reusable rocket [Reusable Launch Vehicle (RLV)] program". LIVE MINT, IN. 2015. Archived from the original on 2016-05-26. Retrieved 2015-12-23.
-
^
"Government of India Department of Space" (PDF). March 14, 2012. Archived from
the original (PDF) on August 5, 2016. Retrieved 2016-04-27.
Feasibility study of project "AVATAR)" has been done by a group of scientists in DRDO. ISRO has no connection with the project.
- ^ "Welcome to Vikram Sarabhai Space Centre - ISRO_Supersonic Combustion Tech". Archived from the original on 2016-03-04. Retrieved 2015-12-23.
- ^ ""Space Transportation Systems: What the future beholds" by Dr. B N Suresh". 2 November 2007. Archived from the original on 1 August 2020. Retrieved 23 December 2015.
- ^ "Successful flight testing of advanced sounding rocket - ISRO". www.isro.gov.in. Archived from the original on 2016-09-09. Retrieved 2015-12-06.
- ^ "ISRO's design of reusable launch vehicle approved". Archived from the original on 2020-08-01. Retrieved 2015-12-25.
- ^ "RLV re-entry mission to use GSLV with PSLV last stage; landing gear to change & more". The Times of India. 2024-06-26. ISSN 0971-8257. Retrieved 2024-06-27.
- ^ a b c "Navigation satellite system by March". Archived from the original on 2020-11-08. Retrieved 2015-12-24.
- ^ "Modeling &Control of Launch Vehicles" (PDF). www.sc.iitb.ac.in. Archived (PDF) from the original on 2015-12-24. Retrieved 2015-12-06.
- ^ "Reusable Launch Vehicles". Brahmand.com. November 25, 2010. Archived from the original on November 1, 2014. Retrieved 2014-10-22.
- ^ "Successful Flight Testing of ISRO's Scramjet Engine Technology Demonstrator". Archived from the original on 2016-09-14. Retrieved 2016-08-28.
- ^ "Indian rockets to soon use atmospheric oxygen as fuel".
- ^ "ISRO set to test scramjet engine". The Hindu. 2015-11-28. ISSN 0971-751X. Archived from the original on 2020-11-08. Retrieved 2015-12-06.
- ^ "India's Reusable Launch Vehicle to be called Pushpak, PM reviews progress". India Today. 27 February 2024. Retrieved 2024-03-15.
- ^ a b "Launch vehicle approved". DNA India. Archived from the original on 11 September 2016. Retrieved 23 May 2016.
- ^ "Make In India Gets Wings With Successful Launch Of Swadeshi Space Shuttle". The Free Press Journal. Archived from the original on 25 May 2016. Retrieved 24 May 2016.
- ^ "India Just Launched A Mini Space Shuttle". sciencealert.com. Archived from the original on 17 September 2016. Retrieved 24 May 2016.
- ^ "Breakthrough in Supersonic combustion technology". Vikram Sarabhai Space Centre website. Archived from the original on 4 March 2016. Retrieved 23 May 2016.
- ^ "Demonstration program". ISRO website. Archived from the original on 23 May 2016. Retrieved 23 May 2016.
- ^ "Low cost access". bharat-rakshak.com. Archived from the original on 3 March 2016. Retrieved 23 May 2016.
- ^ "India Flies Winged Space Plane On Experimental Suborbital Launch". spaceflightnow.com. Archived from the original on 30 August 2016. Retrieved 24 May 2016.
- ^ "ISRO's Reusable Launch Vehicle What Happened And What Next". thewire.in. Archived from the original on 25 May 2016. Retrieved 24 May 2016.
- ^ "VSSC to find new skies". The Indian Express. Archived from the original on 15 September 2016. Retrieved 24 May 2016.
- ^ "India's own space shuttle launched successfully". The Hindustan Times. Archived from the original on 30 August 2016. Retrieved 24 May 2016.
- ^ "ISRO to Test Rocket That Uses Oxygen Directly from the Atmosphere to Fuel Itself". 2016-05-26. Archived from the original on 2016-09-08. Retrieved 2016-07-07.
- ^ "Flight testing of advanced sounding rocket". ISRO website. Archived from the original on 9 September 2016. Retrieved 23 May 2016.
- ^ "ISRO Progresses Towards a Swadeshi Space Plane". Khul Ke. Archived from the original on 2023-09-07. Retrieved 2023-09-07.
- ^ India’s Reusable Launch Vehicle-Technology Demonstrator (RLV-TD), Successfully Flight Tested Archived 2021-02-09 at the Wayback Machine. 23 May 2016. ISRO.
- ^ a b RLV-TD Archived 2021-04-17 at the Wayback Machine. ISRO. 23 May 2016. Includes diagrams.
- ^ Kumar, Kiran (28 April 2016). ""Indigenous Development of Materials for Space Programme"". Archived from the original on 30 June 2020. Retrieved 30 June 2020.
- ^ "SILICA TILES AS A THERMAL PROTECTION FOR RLV-TD" (PDF). Archived (PDF) from the original on 30 June 2020. Retrieved 30 June 2020.
- ^ "Current Science Volume 114 - Issue 01". Archived from the original on 30 June 2020. Retrieved 30 June 2020.
- ^ "The technology behind India's Reusable Launch Vehicle". 12 November 2018. Archived from the original on 30 June 2020. Retrieved 30 June 2020.
- ^ "A Deep Dive Into ISRO's Reusable Launch Vehicle Technology – Part I". Archived from the original on 28 June 2020. Retrieved 30 June 2020.
- ^ "A Deep Dive Into ISRO's Reusable Launch Vehicle Technology – Part II". Archived from the original on 3 July 2020. Retrieved 30 June 2020.
- ^ "An Indian space shuttle takes shape 2009". The Hindu. 31 March 2009. Archived from the original on 2023-04-04. Retrieved 2023-04-24.
- ^ Yadav, Sandeep; Jayakumar, M.; Nizin, Aziya; Kesavabrahmaji, K.; Shyam Mohan, N. (2017-12-01). "Final Phase Flight Performance and Touchdown Time Assessment of TDV in RLV-TD HEX-01 Mission". Journal of the Institution of Engineers (India): Series C. 98 (6): 679–688. Bibcode: 2017JIEIC..98..679Y. doi: 10.1007/s40032-017-0403-9. ISSN 2250-0553. S2CID 115904439.
- ^ "India's Reusable Launch Vehicle Successfully Flight Tested". ISRO website. Archived from the original on 14 September 2016. Retrieved 23 May 2016.
- ^ "ISRO successfully launches Indias first ever indigenous space shuttle". The Economic Times. Archived from the original on 28 August 2016. Retrieved 24 May 2016.
- ^ "ISRO Gears up for 6 Major Missions This Year". Express News Service. 30 May 2015. Archived from the original on 10 September 2016. Retrieved 8 June 2015.
- ^ "Landing experiment likely in Challakere next week". The Times of India. ISSN 0971-8257. Retrieved 2024-03-16.
- ^ ""ISRO Reusable Launch Vehicles Landing Experiment Successful"".
- ^ "ISRO successfully conducts the Reusable Launch Vehicle Autonomous Landing Mission (RLV LEX)". Indian Space Research Organisation. isro.gov.in. April 2, 2023. Archived from the original on April 2, 2023. Retrieved April 2, 2023.
- ^ "Isro reusable launch vehicle's landing experiment successful; RLV closer to orbital re-entry mission". The Times of India. 2023-04-02. ISSN 0971-8257. Archived from the original on 2023-04-02. Retrieved 2023-04-02.
- ^ Kumar, Chethan (2024-03-22). "Isro completes 2nd key landing experiment of reusable launch vehicle". The Times of India. ISSN 0971-8257. Retrieved 2024-03-22.
- ^ Bagla, Pallava (22 March 2024). "Watch: India's 21st Century Pushpak 'Viman' Successfully Launched". NDTV.com. Retrieved 2024-03-22.
- ^ "ISRO nails it again! Landing mission of Reusable Launch Vehicle 'Pushpak' conducted successfully in Karnataka – See Pictures". Financialexpress. 2024-03-22. Retrieved 2024-03-22.
- ^ "ISRO achieves another milestone, successfully lands Pushpak reusable launch vehicle". Moneycontrol. 2024-03-22. Retrieved 2024-03-22.
- ^ a b Rajwi, Tiki (2024-06-08). "ISRO all set for third reusable launch vehicle landing experiment". The Hindu. ISSN 0971-751X. Retrieved 2024-06-09.
- ^ "ISRO's reusable launch vehicle, made for low-cost space missions, set for 3rd test landing this week". ThePrint. 2024-06-17. Retrieved 2024-06-17.
- ^ "Isro's reusable launch vehicle completes 3rd landing test, paving way for orbital re-entry". The Times of India. ISSN 0971-8257. Retrieved 2024-06-23.
- ^ a b "ISRO successfully conducts third and final 'Pushpak' Reusable Launch Vehicle landing experiment". The Hindu. 2024-06-23. ISSN 0971-751X. Retrieved 2024-06-23.
- ^ "Poster on the RLV-TD". Archived from the original on 2016-03-03. Retrieved 2009-07-30.
- ^ "Reusable Launch Vehicle - Technology Demonstration Program (RLV-TD) - ISRO". isro.gov.in. Archived from the original on 2016-05-23. Retrieved 2015-06-08.
External links
| Organisations |
| ||||||
|---|---|---|---|---|---|---|---|
| Programmes | |||||||
| Satellites | |||||||
| Space observatories |
| ||||||
| Lunar and planetary spacecraft |
| ||||||
| Human spaceflight | |||||||
| Launch vehicles |
| ||||||
| Engines |
| ||||||
| Spaceports | |||||||
| Research facilities | |||||||
| Communications | |||||||
| Legislation and policy |
| ||||||
| Private companies | |||||||
| Related |
| ||||||